 驱动LSM6DS3TR-C实现高效运动检测与数据采集(11)----磁力计校准
驱动LSM6DS3TR-C实现高效运动检测与数据采集(11)----磁力计校准

概述
磁力计校准是确保传感器数据准确性和可靠性的关键步骤。磁力计用于测量地球磁场,并在导航、定位、姿态测量等应用中起到重要作用。然而,磁力计在使用过程中会受到环境磁场、硬件偏差、安装误差等因素的影响,从而导致测量数据出现偏差。因此,校准磁力计以消除这些影响,是获得精确测量数据的必要步骤。
本文将介绍如何使用ST提供的MotionFX库在嵌入式系统中实现磁力计校准, 通过本文的介绍,读者将能够理解磁力计校准的基本概念,掌握使用MotionFX库进行校准的步骤和方法,并学会如何在实际项目中实现磁力计的校准,以获得高精度的磁场测量数据。
需要样片的可以加群申请:615061293 。

视频教学
[https://www.bilibili.com/video/BV1BS42197a5/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/89614587]
硬件准备
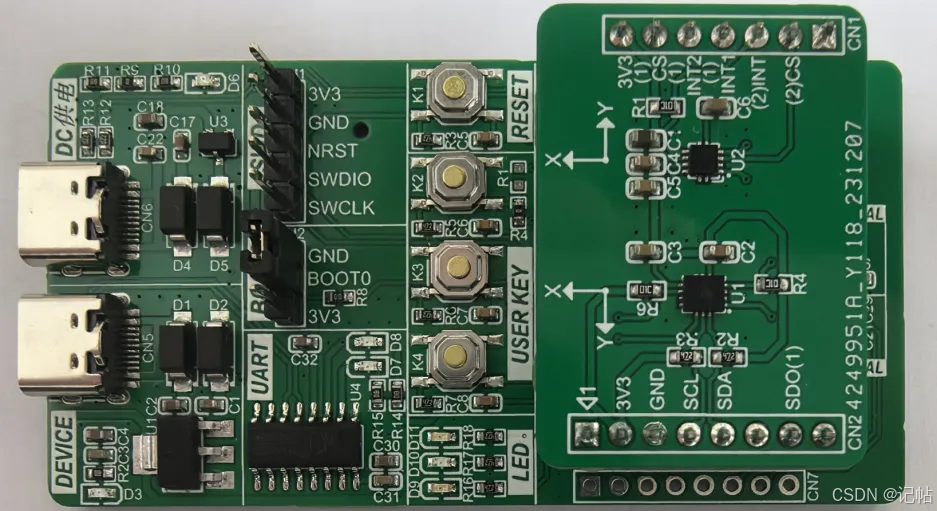
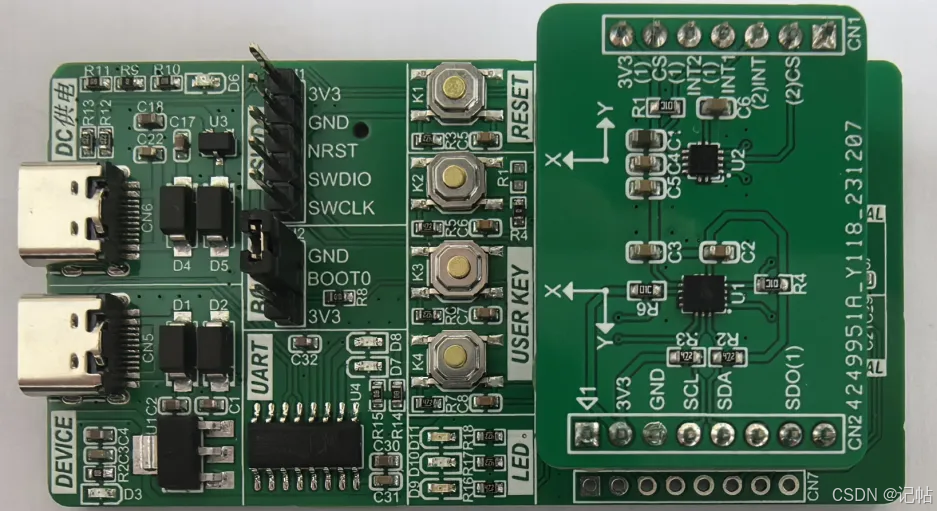
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为STM32H503CB,陀螺仪为LSM6DS3TR-C,磁力计为LIS2MDL。
DataLogFusion
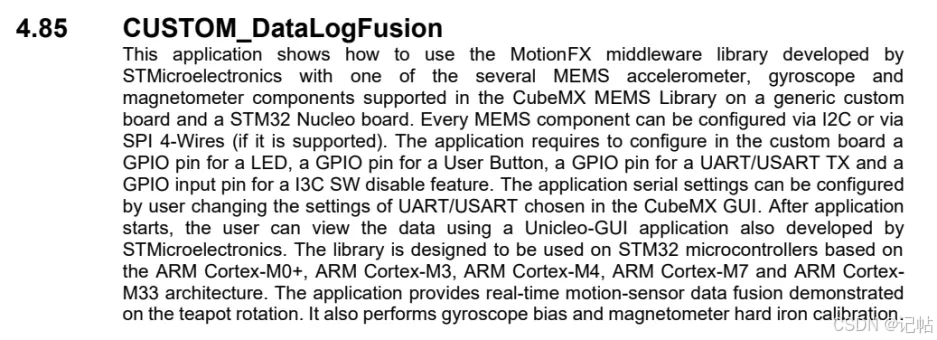
这里参考ST提供的DataLogFusion程序,DataLogFusion示例应用展示了如何使用STMicroelectronics开发的MotionFX中间件库进行实时运动传感器数据融合。
DataLogFusion的主要执行流程包括初始化硬件和传感器、中间件库(MotionFX)的配置与初始化、传感器数据的采集、实时数据融合以及结果的输出。
磁力计校准过程
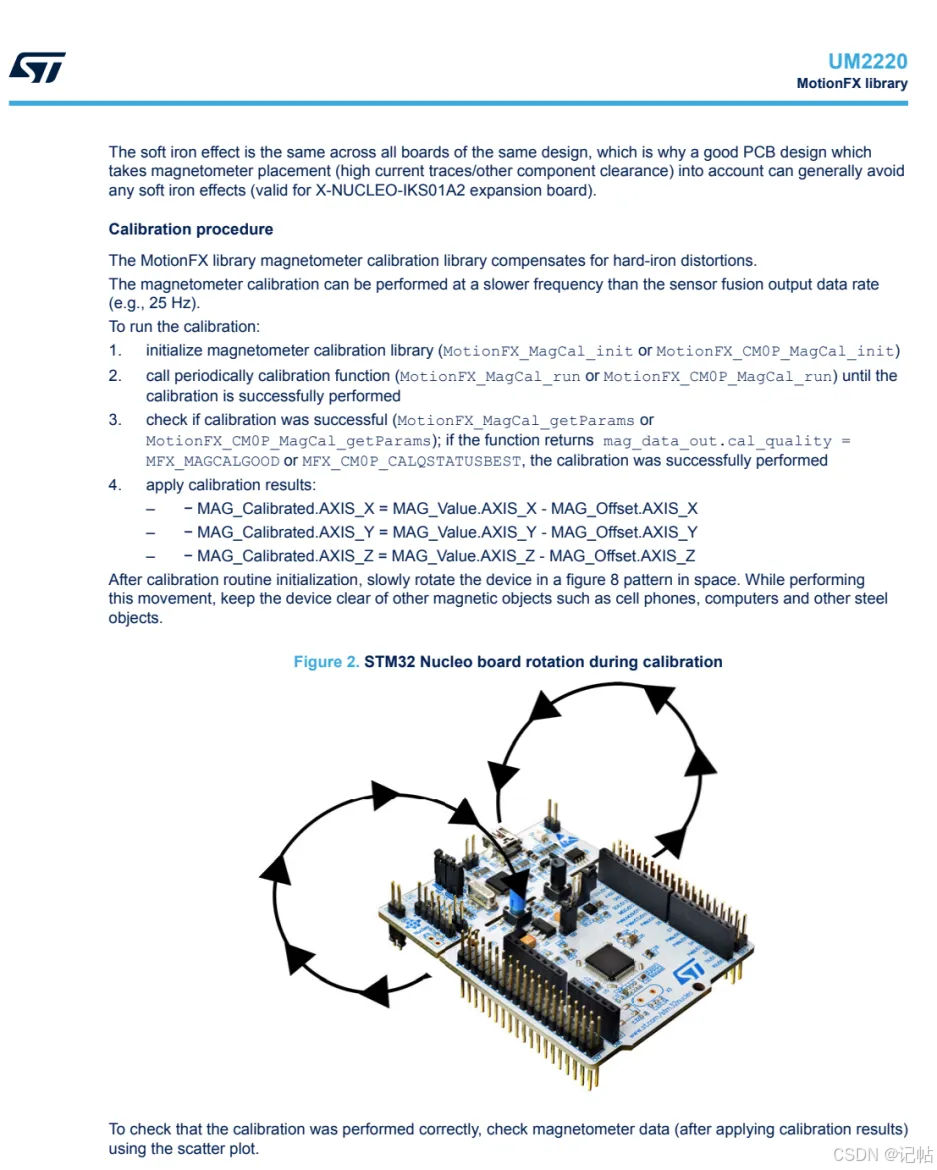
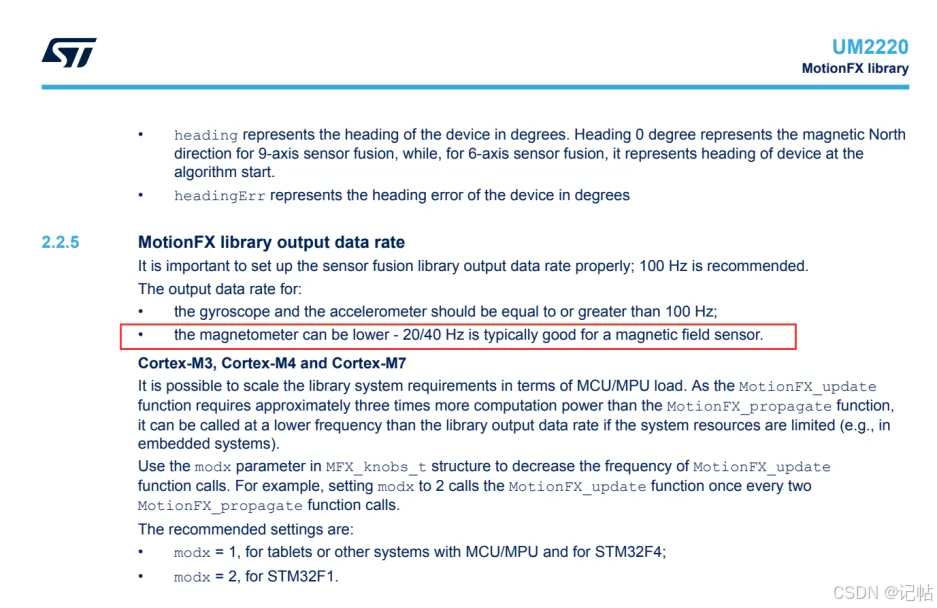
MotionFX库的磁力计校准库用于补偿硬铁失真。磁力计校准可以以比传感器融合输出数据速率更慢的频率进行(例如25 Hz)。
● 初始化磁力计校准库:
● 调用 MotionFX_MagCal_init 或 MotionFX_CM0P_MagCal_init 函数。
● 定期调用校准函数:
● 调用 MotionFX_MagCal_run 或 MotionFX_CM0P_MagCal_run 函数,直到校准成功完成。
● 检查校准是否成功:
● 调用 MotionFX_MagCal_getParams 或 MotionFX_CM0P_MagCal_getParams 函数。如果函数返回 mag_data_out.cal_quality = MFX_MAGCALGOOD 或 MFX_CM0P_CALQSTATUSBEST,则校准成功。
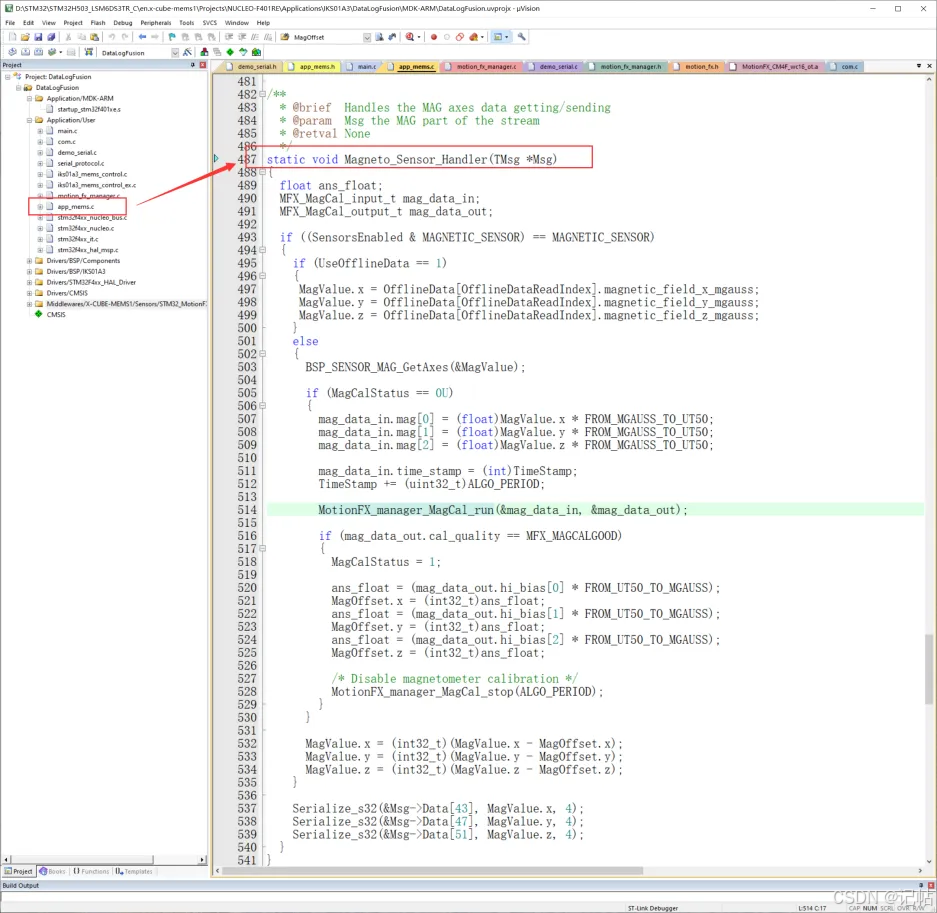
在app_mems.c中的Magneto_Sensor_Handler函数负责处理磁力计(磁传感器)数据的获取、校准和发送。该函数的主要功能是从磁力计传感器获取数据,进行必要的校准,然后将处理后的数据传输给其他部分使用。具体包括以下步骤:
- 检查传感器是否启用:函数首先检查是否启用了磁力计传感器。如果传感器未启用,则函数不会执行进一步操作。
- 获取磁力计数据:
○ 如果使用离线数据(即在调试或仿真模式下),函数会从预定义的离线数据数组中读取磁力计数据。
○ 如果使用实时数据,函数会通过调用BSP_SENSOR_MAG_GetAxes函数从实际的磁力计传感器中读取当前的磁力计数据。 - 执行磁力计校准:
○ 函数检查磁力计是否已经校准。如果尚未校准,则会进行校准过程。
○ 将获取的磁力计数据转换为适当的单位,并准备校准输入数据。
○ 调用MotionFX_manager_MagCal_run函数运行校准算法。
○ 如果校准结果良好(校准质量达到标准),函数会保存校准偏移值,并停止进一步的校准。 - 应用校准偏移:将校准偏移应用到磁力计读数中,以补偿硬件偏差和环境干扰。
- 序列化并发送数据:将校准后的磁力计数据序列化,并存储到消息结构(Msg)中,以供系统其他部分使用。
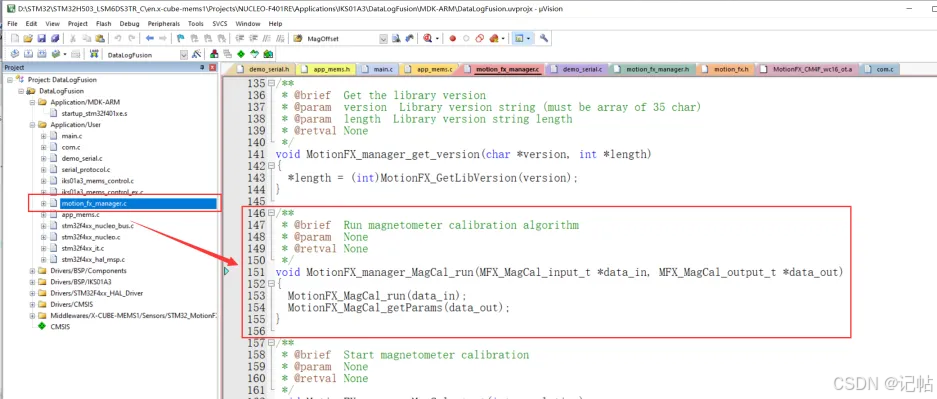
MotionFX_manager_MagCal_run函数用于运行磁力计校准算法。该函数接受磁力计输入数据,调用MotionFX库中的校准算法对数据进行处理,并返回校准结果。
MotionFX_MagCal_run函数执行校准算法,对输入数据进行处理,计算出校准所需的参数。
MotionFX_MagCal_getParams函数从校准算法中获取校准后的参数,并存储在输出数据结构data_out中。这些参数包括磁力计的偏移和标度因子等校准信息。
MotionFX_MagCal_getParams
MotionFX_MagCal_getParams函数用于获取磁力计的校准参数。这些参数包括校准后的硬铁偏移量和校准质量指标。该函数通过传入一个指向输出数据结构的指针,返回校准结果的详细信息。
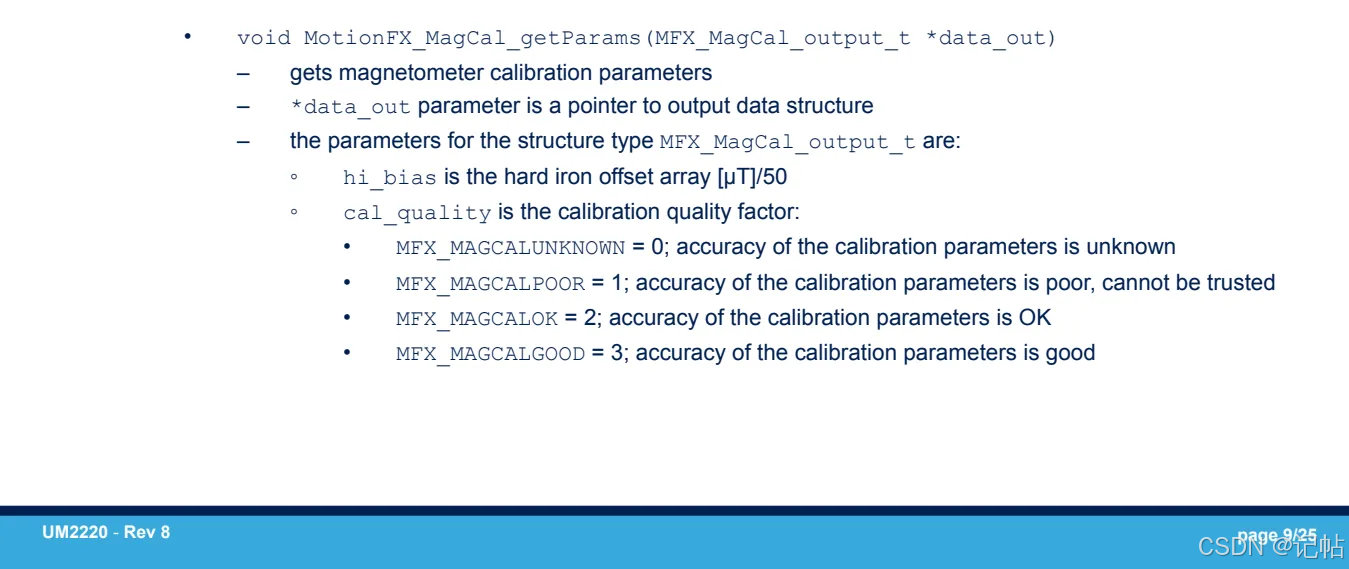
调用MotionFX_MagCal_getParams函数后,可以通过检查data_out结构体中的参数来评估校准结果的质量,并应用偏移量来调整磁力计数据。
cal_quality:校准质量因子,指示校准结果的准确性。具体值包括:
MFX_MAGCALUNKNOWN = 0:校准参数的准确性未知。
MFX_MAGCALPOOR = 1:校准参数的准确性较差,不能被信任。
MFX_MAGCALOK = 2:校准参数的准确性尚可。
MFX_MAGCALGOOD = 3:校准参数的准确性良好。
校准移植
在main.c中添加变量定义。
/* USER CODE BEGIN 0 */
float MagOffset[3]={0.0f,0.0f,0.0f};//磁力计偏差
int Mag_TimeStamp,Mag_TimeStamp_1,Mag_TimeStamp_2;//磁力计时间戳
uint8_t Mag_flag=0;
/* USER CODE END 0 */
磁力计数据官方文档推荐20/40HZ。
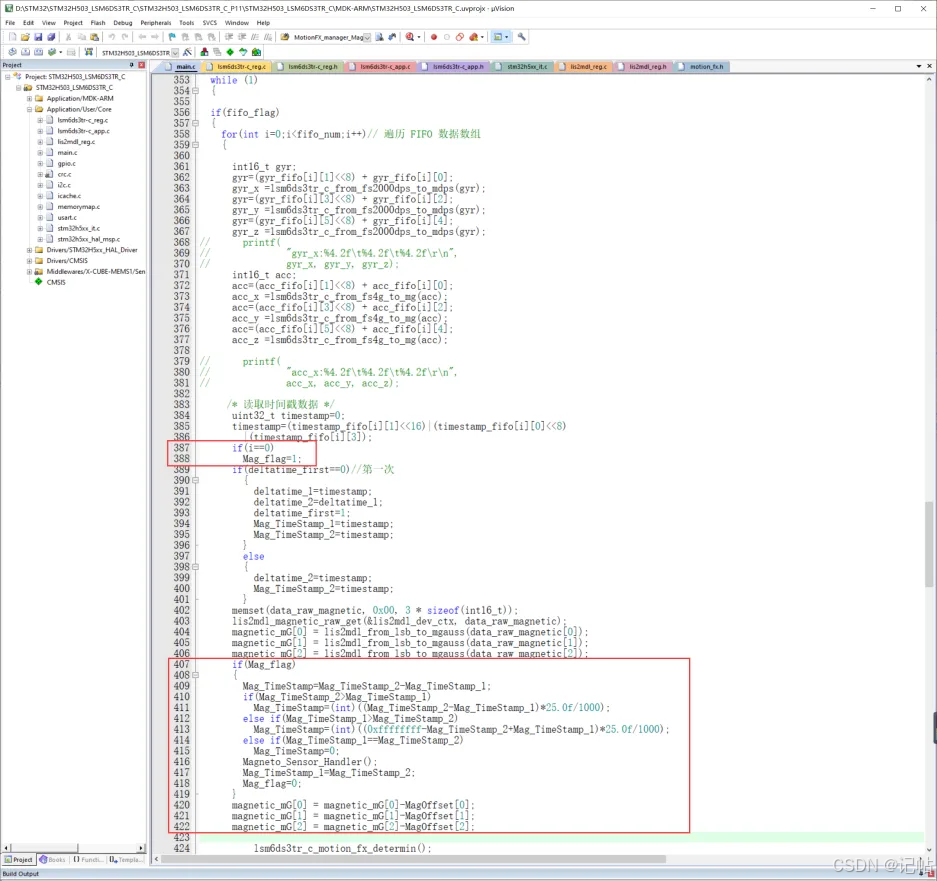
在mian.c中添加磁力计校准执行函数这里陀螺仪数据为416Hz,单次循环执行10次,所以让磁力计在单次循环中只执行一次,频率则为40Hz左右。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(fifo_flag)
{
for(int i=0;i< fifo_num;i++)// 遍历 FIFO 数据数组
{
int16_t gyr;
gyr=(gyr_fifo[i][1]<
gyr_x =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][3]<
gyr_y =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][5]<
gyr_z =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
// printf(
// "gyr_x:%4.2ft%4.2ft%4.2frn",
// gyr_x, gyr_y, gyr_z);
int16_t acc;
acc=(acc_fifo[i][1]<
acc_x =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][3]<
acc_y =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][5]<
acc_z =lsm6ds3tr_c_from_fs4g_to_mg(acc);
// printf(
// "acc_x:%4.2ft%4.2ft%4.2frn",
// acc_x, acc_y, acc_z);
/* 读取时间戳数据 */
uint32_t timestamp=0;
timestamp=(timestamp_fifo[i][1]<
|(timestamp_fifo[i][3]);
if(i==0)
Mag_flag=1;
if(deltatime_first==0)//第一次
{
deltatime_1=timestamp;
deltatime_2=deltatime_1;
deltatime_first=1;
Mag_TimeStamp_1=timestamp;
Mag_TimeStamp_2=timestamp;
}
else
{
deltatime_2=timestamp;
Mag_TimeStamp_2=timestamp;
}
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&lis2mdl_dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
if(Mag_flag)
{
Mag_TimeStamp=Mag_TimeStamp_2-Mag_TimeStamp_1;
if(Mag_TimeStamp_2 >Mag_TimeStamp_1)
Mag_TimeStamp=(int)((Mag_TimeStamp_2-Mag_TimeStamp_1)*25.0f/1000);
else if(Mag_TimeStamp_1 >Mag_TimeStamp_2)
Mag_TimeStamp=(int)((0xffffffff-Mag_TimeStamp_2+Mag_TimeStamp_1)*25.0f/1000);
else if(Mag_TimeStamp_1==Mag_TimeStamp_2)
Mag_TimeStamp=0;
Magneto_Sensor_Handler();
Mag_TimeStamp_1=Mag_TimeStamp_2;
Mag_flag=0;
}
magnetic_mG[0] = magnetic_mG[0]-MagOffset[0];
magnetic_mG[1] = magnetic_mG[1]-MagOffset[1];
magnetic_mG[2] = magnetic_mG[2]-MagOffset[2];
lsm6ds3tr_c_motion_fx_determin();
deltatime_1=deltatime_2;
}
fifo_flag=0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
在app.h中添加磁力计校准函数定义。
#define FROM_UT50_TO_MGAUSS 500.0f
void Magneto_Sensor_Handler(void);
在app.c中添加磁力计校准函数。
typedef struct
{
uint8_t hours;
uint8_t minutes;
uint8_t seconds;
uint8_t subsec;
float pressure;
float humidity;
float temperature;
int32_t acceleration_x_mg;
int32_t acceleration_y_mg;
int32_t acceleration_z_mg;
int32_t angular_rate_x_mdps;
int32_t angular_rate_y_mdps;
int32_t angular_rate_z_mdps;
int32_t magnetic_field_x_mgauss;
int32_t magnetic_field_y_mgauss;
int32_t magnetic_field_z_mgauss;
} offline_data_t;
#define OFFLINE_DATA_SIZE 8
uint8_t UseOfflineData = 0;
uint8_t MagCalStatus = 0;
offline_data_t OfflineData[OFFLINE_DATA_SIZE];
extern float MagOffset[3];
extern float magnetic_mG[3];
extern int Mag_TimeStamp;
/**
* @brief Handles the MAG axes data getting/sending
* @param Msg the MAG part of the stream
* @retval None
*/
void Magneto_Sensor_Handler(void)
{
float ans_float;
MFX_MagCal_input_t mag_data_in;
MFX_MagCal_output_t mag_data_out;
mag_data_in.mag[0] = (float)magnetic_mG[0] * FROM_MGAUSS_TO_UT50;
mag_data_in.mag[1] = (float)magnetic_mG[1] * FROM_MGAUSS_TO_UT50;
mag_data_in.mag[2] = (float)magnetic_mG[2] * FROM_MGAUSS_TO_UT50;
mag_data_in.time_stamp = (int)Mag_TimeStamp;
// Mag_TimeStamp += (uint32_t)ALGO_PERIOD;
MotionFX_MagCal_run(&mag_data_in);
MotionFX_MagCal_getParams(&mag_data_out);
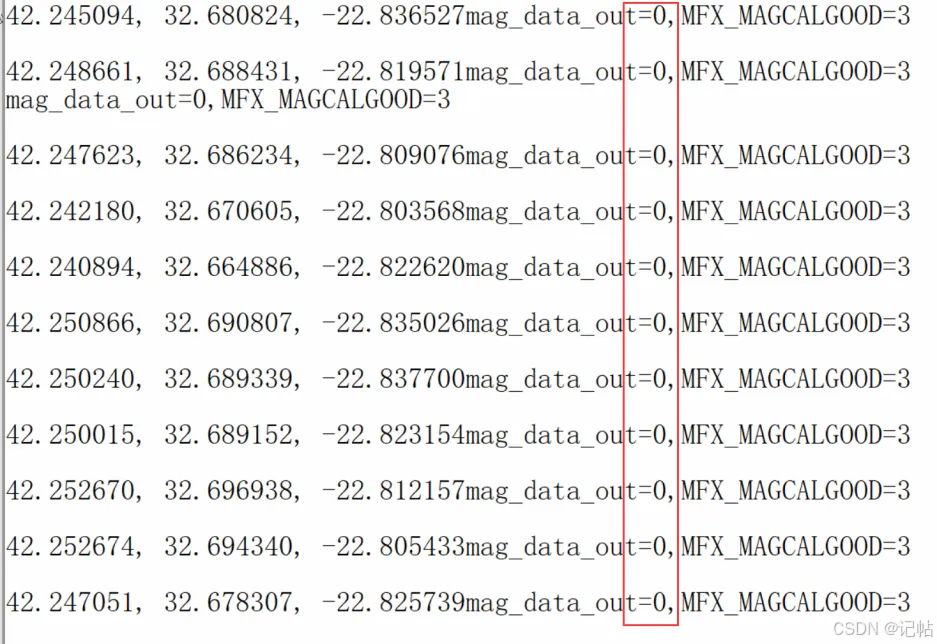
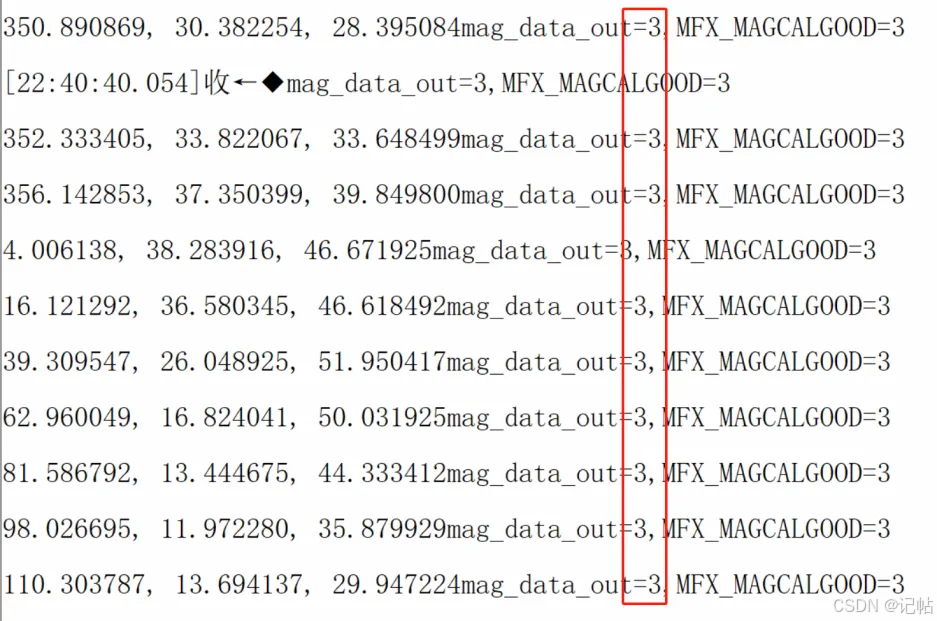
printf("mag_data_out=%d,MFX_MAGCALGOOD=%dn",mag_data_out.cal_quality,MFX_MAGCALGOOD);
if (mag_data_out.cal_quality == MFX_MAGCALGOOD)
{
// MagCalStatus = 1;
ans_float = (mag_data_out.hi_bias[0] * FROM_UT50_TO_MGAUSS);
MagOffset[0] = (int32_t)ans_float;
ans_float = (mag_data_out.hi_bias[1] * FROM_UT50_TO_MGAUSS);
MagOffset[1] = (int32_t)ans_float;
ans_float = (mag_data_out.hi_bias[2] * FROM_UT50_TO_MGAUSS);
MagOffset[2] = (int32_t)ans_float;
// /* Disable magnetometer calibration */
// MotionFX_manager_MagCal_stop(ALGO_PERIOD);
}
}
演示
未校准成功时未0。
校准成功时为3。
审核编辑 黄宇
-
传感器
+关注
关注
2571文章
53493浏览量
772465 -
驱动
+关注
关注
12文章
1923浏览量
87426 -
数据采集
+关注
关注
40文章
7382浏览量
117336 -
运动检测
+关注
关注
0文章
40浏览量
12768
发布评论请先 登录
浅谈HMC5883L和QMC5883P磁力计的区别及STM32F103驱动
实时、高效,解锁气象数据采集新速度——气象数据采集器
需要将lsm6ds3tr-c传感器集成到展锐平台android系统,请问有示例文档吗?
LSM6DS3TRC FIFO模式,长时间运行\"卡死\"有人遇到过吗
labview数据采集同步性及获取时间问题
labview进行的数据采集
使用iic对mpu9250进行读取数据,读取磁力计数据时采用的是主控iic方式,但是读取的速度特别慢,为什么?
LSM6DS3TRC读取加速度数据不对是哪里的问题?
峟思量水堰计的数据采集频率和存储容量是多少?

十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙

振弦式位移计的数据采集频率可以调整吗?

LSM6DSV16X基于MLC智能笔动作识别(2)----MLC数据采集
陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算




 工商网监
工商网监
评论